


жөҺеҚ—йЎәеҘҮеҮҖеҢ–е·ҘзЁӢжңүйҷҗе…¬еҸё
з”өиҜқпјҲдј зңҹпјүпјҡ0531-68824415
жүӢ жңәпјҡ13854165330
Q Qпјҡ340095748
иҒ”зі»дәә:еј з»ҸзҗҶ
йӮ® зј–:250024
йӮ® з®ұ:340095748@qq.com
ең° еқҖ:еұұдёңзңҒжөҺеҚ—еёӮеӨ©жЎҘеҢәж–°еҫҗеұ…委дјҡй»„жІіе»әйӮҰеӨ§жЎҘиҘҝдҫ§1-6еҸ·
[ж‘ҳиҰҒ] еҜ№еҚҠеҜјдҪ“жҙҒеҮҖе®Өжё©ж№ҝеәҰжҺ§еҲ¶жөҒзЁӢиҝӣиЎҢд»Ӣз»ҚпјҢ并еҲҶжһҗжҙҒеҮҖе®Өзҡ„жё©ж№ҝеәҰжҺ§еҲ¶ж–№жі•гҖӮеңЁPID жҺ§еҲ¶зҡ„еҹәзЎҖдёҠпјҢеј•е…ҘжЁЎзіҠжҺ§еҲ¶иҫҫеҲ°жҸҗй«ҳжҺ§еҲ¶зҡ„ж•ҲжһңгҖӮ
[е…ій”®иҜҚ] жё©ж№ҝеәҰпјӣPIDпјӣжЁЎзіҠжҺ§еҲ¶
еј•иЁҖ
йҡҸзқҖеҚҠеҜјдҪ“з”ҹдә§е·Ҙиүәзҡ„дёҚж–ӯеҸ‘еұ•пјҢ жӣҙзІҫеҜҶгҖҒйӣҶжҲҗеәҰжӣҙй«ҳжҳҜиЎҢдёҡеҸ‘еұ•зҡ„и¶ӢеҠҝгҖӮзӣ®еүҚпјҢеҲ¶йҖ е·Ҙиүәе·Із»Ҹиҝӣе…Ҙдәҡзәізұіж—¶д»Ј,зәҝе®ҪйғҪеңЁ30-180 зәізұід№Ӣй—ҙпјҢеҜ№з”ҹдә§и®ҫеӨҮзҡ„зІҫеәҰиҰҒжұӮи¶ҠжқҘи¶ҠдёҘж јпјҢеӣ жӯӨпјҢйҷӨдәҶи®ҫеӨҮжң¬иә«зҡ„е·Ҙиүәж°ҙе№ійңҖиҰҒиҫҫеҲ°з”ҹдә§иҰҒжұӮд»ҘеӨ–пјҢе…¶жүҖеӨ„зҡ„з”ҹдә§зҺҜеўғвҖ”вҖ”жҙҒеҮҖе®Өзҡ„еҗ„йЎ№жҢҮж Үд№ҹеҝ…йЎ»иў«дёҘж јең°жҺ§еҲ¶пјҢеҢ…жӢ¬пјҡжҙҒеҮҖеәҰгҖҒжё©ж№ҝеәҰгҖҒз…§еәҰгҖҒж°”жөҒж–№еҗ‘гҖҒжҢҜеҠЁйқҷз”өгҖҒзЈҒеңәд»ҘеҸҠжңүе®іж°”дҪ“зӯүгҖӮе…¶дёӯзҡ„жё©ж№ҝеәҰжҺ§еҲ¶жҳҜйҮҚзӮ№пјҢе…¶жҺ§еҲ¶зҡ„ж•ҲжһңзӣҙжҺҘеҪұе“ҚзқҖз”ҹдә§зҡ„дјҳиүҜзҺҮгҖӮзӣ®еүҚеҚҠеҜјдҪ“жҙҒеҮҖе®ӨеҜ№жё©ж№ҝеәҰзҡ„жҺ§еҲ¶иҢғеӣҙйҖҡеёёдёәпјҡ жё©еәҰ22+/-0.5в„ғпјҢж№ҝеәҰ45+/-3%RHгҖӮжң¬ж–ҮйҖҡиҝҮеҜ№зҺ°жңүжҙҒеҮҖе®Өжё©ж№ҝеәҰжҺ§еҲ¶зі»з»ҹзҡ„з ”з©¶пјҢеј•е…ҘжЁЎзіҠжҺ§еҲ¶пјҢд»ҘжҸҗй«ҳжё©ж№ҝеәҰжҺ§еҲ¶зҡ„е®һйҷ…ж•ҲжһңгҖӮ
1 жё©ж№ҝеәҰеӨ„зҗҶиҝҮзЁӢ
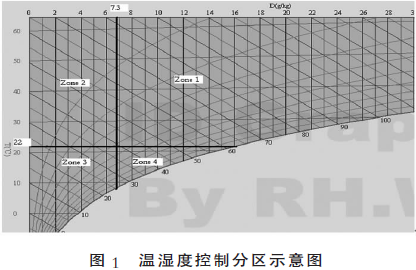
еҜ№з©әж°”еҚ•зәҜең°еҠ зғӯжҲ–еҲ¶еҶ·(жңӘиҫҫеҲ°йҘұе’ҢзҠ¶жҖҒ)иҝҮзЁӢпјҢжҳҜеҗ«ж№ҝйҮҸдҝқжҢҒдёҚеҸҳзҡ„иҝҮзЁӢпјҢеҚіз»қеҜ№ж№ҝеәҰдҝқжҢҒдёҚеҸҳзҡ„иҝҮзЁӢгҖӮж№ҝз©әж°”з»ҸиҝҮзӣҳз®ЎеҠ зғӯпјҢжё©еәҰеҚҮй«ҳиҖҢзӣёеҜ№ж№ҝеәҰдёӢйҷҚпјӣзӣёеҸҚ,еҜ№еҶ·еҚҙиҝҮзЁӢпјҢжё©еәҰдёӢйҷҚиҖҢзӣёеҜ№ж№ҝеәҰзӣёеә”еҚҮй«ҳпјҢеӣ жӯӨжҲ‘们еҸҜд»Ҙеҫ—еҮәпјҢжё©еәҰе’ҢзӣёеҜ№ж№ҝеәҰжҳҜдёӨдёӘдёҚеҗҢж–№еҗ‘зҡ„жҺ§еҲ¶йҮҸпјҢиҰҒдҪҝжё©ж№ҝеәҰеҗҢж—¶еҗ‘зӣёеҗҢзҡ„и¶ӢеҠҝеҸҳеҢ–пјҢ еҲҷеҚ•зәҜйқ еҠ зғӯ/еҶ·еҚҙиҝҮзЁӢжҳҜдёҚиғҪе®һзҺ°зҡ„гҖӮеҶ·еҚҙеҺ»ж№ҝиҝҮзЁӢжҳҜж№ҝз©әж°”з»ҸеҶ·еҚҙиҫҫеҲ°йҘұе’ҢеҗҺ继з»ӯеҲ¶еҶ·зҡ„иҝҮзЁӢ,ж№ҝз©әж°”з»ҸиҝҮеҶ·еҚҙзӣҳз®Ўз»“йңІжһҗеҮәж°ҙж»ҙд»ҺиҖҢйҷҚдҪҺдәҶз»қеҜ№ж№ҝеәҰ,иө·еҲ°еҺ»ж№ҝзҡ„дҪңз”ЁгҖӮеӣ иҖҢжҲ‘们еҸҜд»Ҙе°Ҷз©әж°”еӨ„зҗҶиҝҮзЁӢеҲҶдёәеҠ зғӯгҖҒеҠ ж№ҝгҖҒйҷҚжё©еҸҠйҷҚжё©еҺ»ж№ҝзӯүеӣӣдёӘиҝҮзЁӢгҖӮеӣҫ1 дёӯ,жЁӘеқҗж Үдёәеҗ«ж№ҝйҮҸпјҢеҚіжҜҸеҚғе…Ӣз©әж°”жүҖеҗ«жңүзҡ„ж°ҙи’ёйҮҸпјӣзәөеқҗж Үдёәж‘„ж°Ҹжё©еәҰгҖӮж №жҚ®зӣ®ж ҮзҠ¶жҖҒпјҢз»қеҜ№ж№ҝеәҰзәҝе’Ңзӣ®ж Үжё©еәҰзәҝеҸҜд»ҘеҲ’еҲҶдёәеӣӣдёӘжҺ§еҲ¶еҢә: Zone 1пјҢZone 2пјҢZone 3пјҢZone 4гҖӮ
дёәдәҶиҫҫеҲ°зӣ®ж Үжё©ж№ҝеәҰжҺ§еҲ¶зӮ№пјҢе…¶еҜ№еә”зҡ„жё©ж№ҝеәҰжҺ§еҲ¶еҲҶеҢәеӨ„зҗҶиҝҮзЁӢдёәпјҡеңЁZone 1 зҡ„иҢғеӣҙеҶ…пјҢе…ҲйҷҚжё©еҺ»ж№ҝпјҢеҶҚеҠ зғӯгҖӮеңЁZone 2 зҡ„иҢғеӣҙеҶ…пјҢе…ҲйҷҚжё©пјҢеҶҚеҠ ж№ҝгҖӮеңЁZone 3 зҡ„иҢғеӣҙеҶ…пјҢе…ҲеҠ зғӯпјҢеҶҚеҠ ж№ҝгҖӮеңЁZone4 зҡ„иҢғеӣҙеҶ…пјҢе…ҲйҷҚжё©еҺ»ж№ҝпјҢеҶҚеҠ зғӯгҖӮ
е®ҡд№үпјҡDвҖ”жҺ§еҲ¶еҜ№иұЎеҗ«ж№ҝйҮҸпјҢTвҖ”жҺ§еҲ¶еҜ№иұЎжё©еәҰгҖӮ
йҖҡеёёжғ…еҶөдёӢпјҢ еҜ№дәҺи®ҫе®ҡеҖјжё©еәҰ22+/-0.5в„ғпјҢж№ҝеәҰ45+/-3%RH иҖҢиЁҖпјҢZone1 е’ҢZone3 зҡ„жғ…еҶөжҜ”иҫғеӨҡпјҢеҚійңҖиҰҒе…ҲйҷҚжё©еҺ»ж№ҝ然еҗҺеҶҚеҠ зғӯжҲ–иҖ…е…ҲеҠ зғӯ然еҗҺеҶҚеҠ ж№ҝгҖӮ
2 жҙҒеҮҖе®Өжё©ж№ҝеәҰеӨ„зҗҶеҹәжң¬жөҒзЁӢеҸҠеёёи§Ғй—®йўҳ
2.1 жҙҒеҮҖе®Өжё©ж№ҝеәҰеӨ„зҗҶеҹәжң¬жөҒзЁӢ
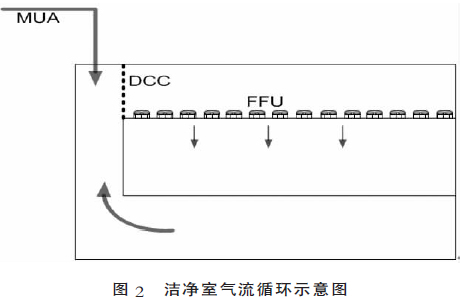
еҚҠеҜјдҪ“жҙҒеҮҖе®ӨеҺӮжҲҝйҖҡеёёйҮҮз”Ёж–°йЈҺз©әи°ғз®ұпјҲMakeup Air UnitпјҢMAUпјү+йЈҺжңәиҝҮж»ӨеҚ•е…ғпјҲFan Filter UnitпјҢFFUпјү+е№ІеҶ·зӣҳз®ЎпјҲDry Cooling CoilпјҢDCCпјүзҡ„и®ҫи®ЎпјҢеҚіж–°йЈҺз©әи°ғз®ұMAU е°Ҷе…·жңүдёҖе®ҡжҙҒеҮҖзӯүзә§е’Ңжё©ж№ҝеәҰзҡ„ж–°йЈҺйҖҒеҲ°жҙҒеҮҖе®Өзҡ„еӣһйЈҺйҖҡйҒ“дёӯпјҢдёҺеҫӘзҺҜеӣһйЈҺиҝӣиЎҢж··еҗҲеҗҺиҝӣе…ҘжҙҒеҮҖе®ӨеҗҠйЎ¶дёҠж–№пјҢйҖҡиҝҮйЈҺжңәиҝҮж»ӨеҚ•е…ғFFU еҗҺиҝӣе…ҘжҙҒеҮҖе®Өз”ҹдә§еҢәеҹҹпјҢд»ҺиҖҢеҹәжң¬иҫҫеҲ°ж— е°ҳе®Өзҡ„жё©ж№ҝеәҰгҖҒжҙҒеҮҖеәҰеҸҠжӯЈеҺӢеәҰзҡ„иҰҒжұӮгҖӮз”ұдәҺж•ҙдёӘжҙҒеҮҖе®ӨеҶ…ж‘Ҷж»ЎдәҶеҗ„з§Қз”ҹдә§жңәеҷЁпјҢиҝҷдәӣжңәеҷЁйғҪдҝқжҢҒжҢҒз»ӯзҡ„иҝҗиҪ¬пјҢдјҡдә§з”ҹеӨ§йҮҸзҡ„зғӯйҮҸпјҢиҝҷдәӣзғӯйҮҸеҸҲе°ҶйҖҡиҝҮеӣһйЈҺйҖҡйҒ“еҶ…зҡ„е№Ізӣҳз®ЎDCC иҝӣиЎҢеҶ·еҚҙиҖҢиў«еёҰиө°пјҢ д»ҺиҖҢиҫҫеҲ°з»ҙжҢҒй•ҝж—¶й—ҙзЁіе®ҡзҡ„жё©ж№ҝеәҰзҺҜеўғгҖӮеҹәжң¬еҫӘзҺҜеҰӮеӣҫ2 жүҖзӨәгҖӮ
еҜ№дәҺжҙҒеҮҖе®Өзҡ„жё©ж№ҝеәҰжҺ§еҲ¶пјҢжңҖдё»иҰҒзҡ„дёӨеқ—жҳҜж–°йЈҺз©әи°ғз®ұе’Ңе№Ізӣҳз®ЎгҖӮж–°йЈҺз©әи°ғз®ұйҷӨдәҶиҰҒдҝқиҜҒеӨ–з•ҢеӨ§ж°”з»ҸиҝҮе…¶дёӯзҡ„еҲқгҖҒдёӯе’Ңй«ҳж•ҲиҝҮж»ӨзҪ‘пјҢжҠҠз©әж°”дёӯзҡ„зІүе°ҳйў—зІ’иҝҮж»ӨжҺүеӨ–пјҢиҝҳиҰҒж №жҚ®жҙҒеҮҖе®ӨйҮҢйқўзҡ„жё©ж№ҝеәҰжғ…еҶөи°ғж•ҙеҮәйЈҺеҸЈзҡ„жё©ж№ҝеәҰпјҢд»ҘдҝқиҜҒйҖҒе…Ҙзҡ„ж–°йЈҺеңЁи§„е®ҡзҡ„жё©ж№ҝеәҰиҢғеӣҙеҶ…гҖӮиҖҢе№Ізӣҳз®ЎжҳҜж №жҚ®жҙҒеҮҖе®ӨйҮҢйқўе®үиЈ…зҡ„жё©ж№ҝеәҰдј ж„ҹеҷЁжөӢйҮҸзҡ„еҖјжқҘи°ғж•ҙе№Ізӣҳз®ЎеҶ·ж°ҙйҳҖзҡ„ејҖеәҰпјҢиҝӣиҖҢи°ғиҠӮеӣһйЈҺе’ҢйҖҒйЈҺж··еҗҲеҗҺзҡ„жё©ж№ҝеәҰпјҢд»ҘдҝқиҜҒж»Ўи¶іеҚҠеҜјдҪ“е·Ҙиүәзҡ„жё©ж№ҝеәҰйңҖжұӮгҖӮ
з”ұдәҺжҜҸз§Қе·ҘиүәеҲ¶зЁӢи®ҫеӨҮзҡ„еҸ‘зғӯйҮҸеӨ§дёҚзӣёеҗҢпјҢеҜјиҮҙжҙҒеҮҖе®ӨеҶ…зҡ„жңәеҸ°еҸ‘зғӯйҮҸеҲҶеёғдёҚеқҮеҢҖгҖӮдҫӢеҰӮзӮүз®ЎжңәеҸ°зҡ„еҸ‘зғӯйҮҸзӣёиҫғдәҺе…¶д»–и®ҫеӨҮеӨ§еҫ—еӨҡпјҲеҹәжң¬еңЁ3пјҚ5еҖҚд№Ӣй—ҙпјүпјҢеӣ жӯӨеҝ…йЎ»еңЁжҙҒеҮҖе®ӨеҶ…з”Ёе№Ізӣҳз®ЎDCC еёҰиө°иҝҷдәӣзғӯйҮҸгҖӮйҖҡеёёиҰҒжұӮеҗҢдёҖеҲ¶зЁӢзҡ„ж°”жөҒз»ҸиҝҮеҗҢдёҖз»„DCCпјҢеңЁе»әзӯ‘е·Із»ҸзЎ®е®ҡзҡ„жғ…еҶөдёӢпјҢеҲ¶зЁӢзҡ„еҲҶеёғиҰҒдёҺеӣһйЈҺйҒ“еһӮзӣҙгҖӮеҰӮжһңжқЎд»¶е…Ғи®ёпјҢжңҖеҘҪжҳҜе°ҶдёҚеҗҢеҲ¶зЁӢзҡ„еҢәеҹҹйҡ”ејҖпјҢиҝҷж ·ж—ўеҸҜйҒҝе…ҚйҮ‘еұһзІ’еӯҗжұЎжҹ“пјҢеҸҲиғҪжҸҗй«ҳжё©ж№ҝеәҰжҺ§еҲ¶зҡ„зЁіе®ҡжҖ§гҖӮ
йҖҡеёёжғ…еҶөдёӢпјҢ жҙҒеҮҖе®Өзҡ„жё©ж№ҝеәҰжҺ§еҲ¶еңЁ22+/-0.5в„ғпјҢ45%+/-3%RHпјҢMAU зҡ„йҖҒйЈҺжё©еәҰеҹәжң¬жҺ§еҲ¶еңЁ21в„ғ-21.5в„ғпјҢеңЁдёҺеҫӘзҺҜйЈҺж··еҗҲеҗҺпјҢFFU еҮәйЈҺеҸЈзҡ„жё©еәҰжҺ§еҲ¶еңЁ22в„ғпјҢиҝҷж ·пјҢз»ҸиҝҮе·ҘдҪңеұӮйқўеҗҺжё©еәҰе°ҶдјҡеҶҚдёҠеҚҮпјҢеңЁжңәеҸ°ж»ЎиҪҪзҡ„жғ…еҶөдёӢдёҠеҚҮжё©еәҰдјҡеҹәжң¬зЁіе®ҡгҖӮ
2.2 жё©ж№ҝеәҰжҺ§еҲ¶дёӯзҡ„еёёи§Ғй—®йўҳ
еңЁMAU зҡ„жё©ж№ҝеәҰеӨ„зҗҶиҝҮзЁӢдёӯпјҢдёәдәҶи§ЈеҶійҷӨж№ҝй—®йўҳпјҢйҖҡеёёйҮҮз”Ёж№ҝеәҰдјҳе…Ҳзҡ„ж–№жі•пјҢеҶ·ж°ҙйҳҖдё»иҰҒз”ЁжқҘйҷӨж№ҝпјҢеҗҢж—¶д№ҹйҖ жҲҗжё©еәҰзҡ„дёӢйҷҚпјҢ然еҗҺйҖҡиҝҮзғӯж°ҙйҳҖзҡ„еҶҚзғӯпјҢдҪҝжё©ж№ҝеәҰеқҮиғҪиҫҫеҲ°жүҖиҰҒжұӮзҡ„еҖјгҖӮиҝҷж ·зҡ„еҒҡжі•иҷҪ然еҸҜд»Ҙж»Ўи¶іи®ҫи®ЎиҰҒжұӮпјҢдҪҶеңЁзӣёеҪ“еӨҡзҡ„ж—¶еҖҷпјҢеҶ·зғӯж°ҙйҳҖдҪҝиғҪйҮҸзӣёдә’жҠөж¶ҲпјҢйҖ жҲҗдәҶиғҪжәҗзҡ„жөӘиҙ№гҖӮеҸҰеӨ–пјҢеҰӮжһңиҝӣе…ҘжҙҒеҮҖе®Өзҡ„ж–°йЈҺжё©еәҰиҝҮй«ҳпјҢе°ҶеҜјиҮҙж•ҙдёӘжҙҒеҮҖе®Өзҡ„зғӯиҙҹиҚ·еҠ еӨ§пјҢDCC ејҖеәҰеўһеӨ§д»ҘжҠөж¶Ҳж–°йЈҺеёҰжқҘзҡ„зғӯиҙҹиҚ·пјӣеҰӮжһңиҝӣе…ҘжҙҒеҮҖе®Өзҡ„ж–°йЈҺзҡ„жё©еәҰиҝҮдҪҺпјҢе°ҶдҪҝеҫ—еңЁDCC ејҖеәҰдёәйӣ¶ж—¶йғҪж— жі•иҫҫеҲ°зҺҜеўғжё©еәҰзҡ„иҰҒжұӮгҖӮж №жҚ®з»ҹи®Ўж•°жҚ®пјҢз©әи°ғзі»з»ҹзҡ„иғҪиҖ—еҚ ж•ҙдёӘеҚҠеҜјдҪ“еҺӮзҡ„иғҪиҖ—зҡ„30%пјҚ35%пјҢ еӣ жӯӨеҜ№з©әи°ғи®ҫеӨҮиҝӣиЎҢдјҳеҢ–жҺ§еҲ¶пјҢйҖүжӢ©еҗҲзҗҶжё©ж№ҝеәҰи®ҫе®ҡеҖјпјҢеҜ№жҸҗй«ҳж•ҙдёӘжҙҒеҮҖе®Өжё©ж№ҝеәҰжҺ§еҲ¶зҡ„зЁіе®ҡжҖ§еҸҠиҠӮиғҪе…·жңүйҮҚиҰҒзҡ„ж„Ҹд№үгҖӮ
3 жё©ж№ҝеәҰжҺ§еҲ¶зі»з»ҹе®һзҺ°
еҹәжң¬дёҠпјҢ зҺ°еңЁжҙҒеҮҖе®Өжё©ж№ҝеәҰиҰҒжұӮдёә22+/-0.5в„ғпјҢ45%+/-3%RHпјҢеҪ“з„¶ж №жҚ®з”ҹдә§е·Ҙиүәзҡ„йңҖжұӮпјҢеҜ№жё©ж№ҝеәҰзҡ„иҰҒжұӮд№ҹдёҚе°ҪзӣёеҗҢгҖӮ
3.1 ж–°йЈҺз©әи°ғз®ұзҡ„жё©ж№ҝеәҰжҺ§еҲ¶
3.1.1 ж–°йЈҺз©әи°ғз®ұеҹәжң¬з»“жһ„
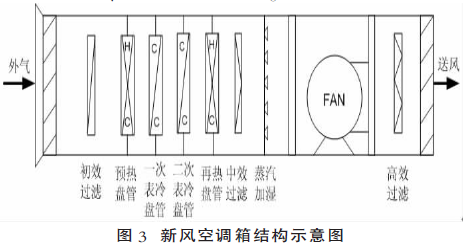
ж–°йЈҺз©әи°ғз®ұеҹәжң¬з»“жһ„еҰӮеӣҫ3 жүҖзӨәпјҢе…¶еӨ„зҗҶжөҒзЁӢеҰӮдёӢпјҡз©әж°”иҝҮж»ӨвҖ”вҖ”вҖ”еҢ…жӢ¬еҲқж•ҲгҖҒдёӯж•ҲгҖҒй«ҳж•ҲдёүйғЁеҲҶпјӣжё©еәҰеӨ„зҗҶвҖ”вҖ”вҖ”еҢ…жӢ¬йў„зғӯзӣҳз®ЎгҖҒдёҖж¬ЎиЎЁеҶ·зӣҳз®ЎгҖҒеҶҚзғӯзӣҳз®ЎдёүйғЁеҲҶпјӣ ж№ҝеәҰеӨ„зҗҶвҖ”вҖ”вҖ”еҢ…жӢ¬дёҖж¬ЎиЎЁеҶ·зӣҳз®ЎгҖҒдәҢж¬ЎиЎЁеҶ·зӣҳз®ЎгҖҒи’ёжұҪеҠ ж№ҝдёүйғЁеҲҶгҖӮ
3.1.2 жё©еәҰеӨ„зҗҶиҝҮзЁӢ
йў„зғӯзӣҳз®Ўзҡ„дҪңз”ЁжҳҜеҜ№еӨ–ж°”иҝӣиЎҢйў„еҠ зғӯгҖӮеңЁеӨ–з•Ңж°”жё©иҫғдҪҺпјҢжҺҘиҝ‘йӣ¶еәҰж—¶пјҢдёәдәҶйҒҝе…Қзӣҳз®ЎеңЁж°”жё©дҪҺдәҺйӣ¶еәҰж—¶иў«еҶ»еқҸпјҢйңҖеҜ№еӨ–ж°”иҝӣиЎҢеҠ зғӯпјҢйҖҡеёёжҳҜеҠ зғӯеҲ°12в„ғгҖӮ
жҺ§еҲ¶йҖҒйЈҺжё©еәҰж—¶пјҢе°ҶйҖҒйЈҺжё©еәҰдёҺе…¶и®ҫе®ҡеҖјиҝӣиЎҢжҜ”иҫғпјҢйҖҡиҝҮPID жҺ§еҲ¶з®—жі•пјҢеҫ—еҮәдёҖдёӘи®Ўз®—еҖјпјҢж №жҚ®иҜҘи®Ўз®—еҖјжқҘзЎ®е®ҡдёҖж¬ЎиЎЁеҶ·зӣҳз®ЎдёҺеҶҚзғӯзӣҳз®ЎйҳҖй—ЁејҖеәҰзҡ„еӨ§е°ҸпјҢе…¶жҺ§еҲ¶жөҒзЁӢеҰӮеӣҫ4 жүҖзӨәгҖӮ
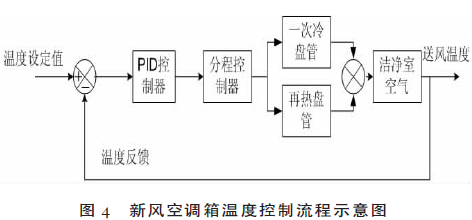
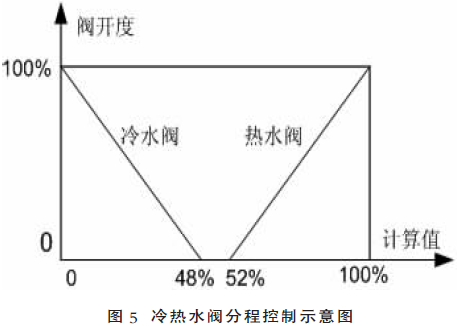
еңЁж•ҙдёӘPID й—ӯзҺҜжҺ§еҲ¶зҺҜиҠӮдёӯеј•е…ҘеҲҶзЁӢжҺ§еҲ¶еҷЁжЁЎеһӢпјҢеҰӮеӣҫ5 жүҖзӨәпјҢе°ҶPID жҺ§еҲ¶з®—жі•еҫ—еҮәзҡ„и®Ўз®—еҖјеҲҶдёәдёӨйғЁеҲҶпјҢ0-48пј…еҸҠ52пјҲпј…пјү-100пј…пјҢе®ғ们еҲҶеҲ«еҜ№еә”дёҖж¬ЎиЎЁеҶ·зӣҳз®ЎеҸҠеҶҚзғӯзӣҳз®ЎпјҢиҝҷж ·е°ұйҒҝе…ҚдәҶеҶ·зғӯж°ҙзӣҳз®ЎеҗҢж—¶жү“ејҖиҖҢеҜјиҮҙиғҪжәҗжөӘиҙ№гҖӮеҗҢж—¶пјҢеңЁеҶ·зғӯж°ҙеҲҮжҚўзҡ„дәӨз•ҢеӨ„48пј…-52пј…пјҢи®ҫзҪ®дәҶжӯ»еҢәпјҢеҚіеҪ“еӨ–ж°”зҡ„жё©еәҰдёҺйҖҒйЈҺжё©еәҰи®ҫе®ҡеҖјзӣёеҪ“жҺҘиҝ‘ж—¶пјҢзғӯж°ҙйҳҖе’ҢеҶ·ж°ҙйҳҖйғҪеӨ„дәҺе…ій—ӯпјҲйҳҖејҖеәҰйғҪдёә0пјүзҡ„зҠ¶жҖҒпјҢд»ҘйҒҝе…ҚеҶ·зғӯж°ҙеңЁдёҙз•ҢзҠ¶жҖҒж—¶дёҚеҒңең°еҲҮжҚўпјҢ еҠ йҖҹдәҶжү§иЎҢжңәжһ„зҡ„жҚҹеқҸпјҢеҗҢж—¶еҸҲиғҪеҮҸе°‘иғҪжәҗзҡ„ж¶ҲиҖ—гҖӮ
3.1.3 ж№ҝеәҰеӨ„зҗҶиҝҮзЁӢ
дёәдәҶйҒҝе…Қе’Ңжё©еәҰд№Ӣй—ҙзҡ„иҖҰеҗҲе…ізі»пјҢж–°йЈҺеҮәеҸЈж№ҝеәҰзҡ„и®ҫе®ҡеҖјйҖҡеёёдёҚйҮҮз”ЁзӣёеҜ№ж№ҝеәҰдҪңдёәжҺ§еҲ¶еҖјпјҢиҖҢжҳҜйҖҡиҝҮе’Ңжё©еәҰи®ҫе®ҡеҖјз»јеҗҲи®Ўз®—еҗҺеҫ—еҮәе…¶з»қеҜ№ж№ҝеәҰпјҢд»ҘйңІзӮ№жё©еәҰжҲ–еҗ«ж№ҝйҮҸжқҘиЎЁзӨәгҖӮжң¬ж–Үд»ҘйңІзӮ№жё©еәҰдёәдҫӢгҖӮе°Ҷи®Ўз®—жүҖеҫ—зҡ„йңІзӮ№жё©еәҰи®ҫе®ҡеҖјдҪңдёәж•ҙдёӘMAU еҮә
еҸЈж№ҝеәҰзҡ„и®ҫе®ҡеҖјгҖӮж №жҚ®йҖҒйЈҺйңІзӮ№жё©еәҰ并дёҺйңІзӮ№жё©еәҰи®ҫе®ҡеҖјиҝӣиЎҢжҜ”иҫғпјҢйҖҡиҝҮPID жҺ§еҲ¶з®—жі•пјҢеҫ—еҮәдёҖдёӘи®Ўз®—еҖјпјҢж №жҚ®иҜҘи®Ўз®—еҖјжқҘзЎ®е®ҡиЎЁеҶ·йҳҖе’ҢеҠ ж№ҝйҳҖејҖеәҰзҡ„еӨ§е°ҸпјҢе…¶жҺ§еҲ¶жөҒзЁӢдёҺжё©еәҰжҺ§еҲ¶зұ»дјјпјҢеҗҢж—¶д№ҹеј•е…ҘдәҶеҲҶзЁӢжҺ§еҲ¶пјҢйҒҝе…Қдёҙз•ҢзҠ¶жҖҒдёӢеҠ ж№ҝдёҺйҷӨж№ҝд№Ӣй—ҙдёҚж–ӯеҲҮжҚўиҖҢеҜјиҮҙзҡ„ж№ҝеәҰжҺ§еҲ¶зҡ„жіўеҠЁгҖӮ
3.2 жҙҒеҮҖе®Өжё©ж№ҝеәҰжҺ§еҲ¶
3.2.1 жҙҒеҮҖе®Өжё©еәҰжҺ§еҲ¶
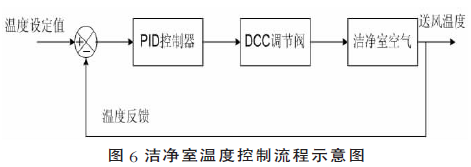
жҙҒеҮҖе®ӨеҶ…зҡ„жё©еәҰPID жҺ§еҲ¶жөҒзЁӢеҰӮеӣҫ6 жүҖзӨәпјҢйҮҮз”Ёзҡ„жҳҜеҹәжң¬зҡ„PID жҺ§еҲ¶пјҢ з”ұдәҺжҙҒеҮҖе®Өжң¬иә«зҡ„еӨ§з©әй—ҙиҖҢйҖ жҲҗзҡ„еӨ§жғҜжҖ§гҖҒеӨ§ж—¶ж»һжҖ§пјҢеңЁи®ҫзҪ®PID еҸӮж•°ж—¶йҖҡеёёе°Ҷз§ҜеҲҶж—¶й—ҙи®ҫзҪ®дёәйӣ¶пјҢд»ҘйҳІжӯўзі»з»ҹиҝҮи°ғиҠӮиҖҢдә§з”ҹжҢҜиҚЎгҖӮ
жҙҒеҮҖе®Өжё©еәҰдё»иҰҒз”ұDCC жқҘи°ғиҠӮпјҢ дҪҶеҗҢж—¶еҸ—ж–°йЈҺйҖҒйЈҺжё©ж№ҝеәҰзҡ„еҪұе“ҚпјҢеҰӮжһңз»ҷе®ҡеӨӘй«ҳзҡ„жё©еәҰпјҢиҝӣе…ҘжҙҒеҮҖе®Өе’ҢеҫӘзҺҜйЈҺж··еҗҲеҗҺпјҢDCC е°ұйңҖиҰҒжӣҙеӨ§йҮҸзҡ„еҶ·йҮҸиҝӣиЎҢеҶ·еҚҙпјҢиҝҷе°ұзӣҙжҺҘеҜјиҮҙиғҪжәҗзҡ„жөӘиҙ№пјӣеҰӮжһңз»ҷе®ҡеӨӘдҪҺзҡ„жё©еәҰпјҢ иҝӣе…ҘжҙҒеҮҖе®Өе’ҢеҫӘзҺҜйЈҺж··еҗҲеҗҺпјҢ еҚідҪҝDCC зҡ„ејҖеәҰдёәйӣ¶пјҢж•ҙдёӘжҙҒеҮҖе®Өзҡ„жё©еәҰеҚҙд»Қ然еӨӘдҪҺпјҢиҝҷе°ҶдҪҝеҫ—ж•ҙдёӘжҙҒеҮҖе®Өзҡ„жё©еәҰи¶…ж ҮгҖӮ
3.2.2 ж–°йЈҺз©әи°ғз®ұжё©ж№ҝеәҰи®ҫе®ҡеҖјжҺ§еҲ¶
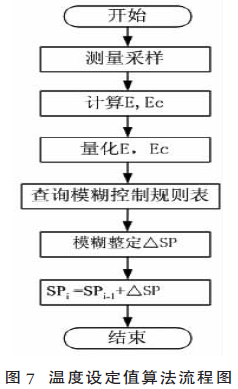
ж–°йЈҺз©әи°ғз®ұйҖҒйЈҺжё©еәҰи®ҫе®ҡеҖјзҡ„йҖүеҸ–жҳҜжҜ”иҫғе…ій”®зҡ„пјҢе®ғеҝ…йЎ»иғҪеӨҹжңҖдҪійҖӮеә”еҪ“еүҚжҙҒеҮҖе®ӨеҶ…жё©еәҰзҡ„йңҖжұӮгҖӮеҰӮжһңз»ҷе®ҡеӨӘй«ҳзҡ„жё©еәҰпјҢиҝӣе…ҘжҙҒеҮҖе®Өе’ҢеҫӘзҺҜйЈҺж··еҗҲеҗҺпјҢDCC е°ұйңҖиҰҒжӣҙеӨ§йҮҸзҡ„еҶ·йҮҸиҝӣиЎҢеҶ·еҚҙпјҢиҝҷе°ұзӣҙжҺҘеҜјиҮҙиғҪжәҗзҡ„жөӘиҙ№пјӣеҰӮжһңз»ҷе®ҡеӨӘдҪҺзҡ„жё©еәҰпјҢиҝӣе…ҘжҙҒеҮҖе®Өе’ҢеҫӘзҺҜйЈҺж··еҗҲеҗҺпјҢеҚідҪҝDCC зҡ„ејҖеәҰдёәйӣ¶пјҢж•ҙдёӘжҙҒеҮҖе®Өзҡ„жё©еәҰеҚҙд»Қ然еӨӘдҪҺпјҢиҝҷе°ҶдҪҝеҫ—ж•ҙдёӘжҙҒеҮҖе®Өзҡ„жё©еәҰи¶…ж ҮгҖӮеӣ жӯӨпјҢеҜ№дәҺMAU ж–°йЈҺйҖҒйЈҺжё©еәҰи®ҫе®ҡеҖјзҡ„йҖүеҸ–жҳҜеҚҒеҲҶйҮҚиҰҒзҡ„пјҢеҝ…йЎ»еңЁзЎ®дҝқзі»з»ҹеңЁжҺ§еҲ¶иҢғеӣҙеҶ…并е°ҪеҸҜиғҪиҫҫеҲ°иҠӮиғҪзҡ„зӣ®зҡ„гҖӮеңЁжӯӨпјҢжҲ‘们引е…ҘжЁЎзіҠжҺ§еҲ¶зҡ„жҖқжғіпјҢйҖҡиҝҮеҜ№жҙҒеҮҖе®Өжё©еәҰеҒҸе·®еҸҠеҒҸе·®еҸҳеҢ–зҺҮзҡ„жЁЎзіҠ规еҲҷеҸҳжҚўпјҢеҫ—еҮәж–°йЈҺз©әи°ғз®ұйҖҒйЈҺжё©еәҰи®ҫе®ҡеҖјSPгҖӮж•ҙдёӘзЁӢеәҸиҝҗиЎҢзҡ„жөҒзЁӢеҰӮеӣҫ7 жүҖзӨә,зЁӢеәҸиҝҗиЎҢеҗҺпјҢе°ҶиҺ·еҫ—ж–°зҡ„SPгҖӮ
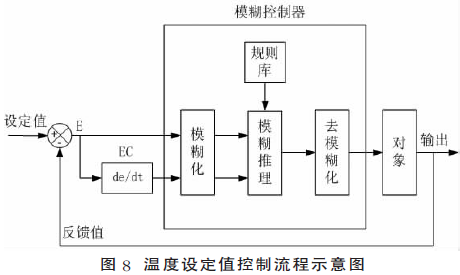
еҹәжң¬зҡ„жЁЎзіҠжҺ§еҲ¶зі»з»ҹеҰӮеӣҫ8 жүҖзӨәгҖӮзі»з»ҹдёӯзҡ„жЁЎзіҠжҺ§еҲ¶еҷЁжҳҜдёӨиҫ“е…ҘдёҖиҫ“еҮәзҡ„,е…¶иҫ“е…ҘйҮҸжҳҜзі»з»ҹзҡ„еҒҸе·®E е’ҢеҒҸе·®еҸҳеҢ–зҺҮEC, иҖҢиҝҷдёӨдёӘйҮҸе…·жңүзЎ®е®ҡзҡ„ж•°еҖј, жҳҜдёӨдёӘжё…жҷ°йҮҸгҖӮж•ҙдёӘжЁЎзіҠжҺ§еҲ¶еҷЁз”ұеӣӣдёӘйғЁеҲҶз»„жҲҗпјҡжЁЎзіҠеҢ–пјҢжЁЎзіҠ规еҲҷеә“пјҢжЁЎзіҠжҺЁзҗҶеҸҠеҺ»жЁЎзіҠеҢ–гҖӮжЁЎзіҠеҢ–зҡ„дҪңз”ЁжҳҜе°ҶдёҖдёӘзЎ®е®ҡзҡ„зӮ№жҳ е°„дёәиҫ“е…Ҙз©әй—ҙзҡ„дёҖдёӘжЁЎзіҠйӣҶеҗҲгҖӮйҖҡиҝҮжЁЎзіҠеҢ–еӨ„зҗҶ,еҫ—еҲ°жЁЎзіҠзҡ„еҒҸе·®йҮҸE д»ҘеҸҠжЁЎзіҠзҡ„еҒҸе·®еҸҳеҢ–зҺҮECгҖӮе…¶дёӯжЁЎзіҠзҡ„еҒҸе·®йҮҸE иҜӯиЁҖеҖјйӣҶеҗҲжңүдёғз§ҚеҸ–еҖјпјҢеҲҶеҲ«жҳҜNB(иҙҹеӨ§)гҖҒNM(иҙҹдёӯ)гҖҒNS( иҙҹе°Ҹ)гҖҒO(йӣ¶)гҖҒPS(жӯЈе°Ҹ)гҖҒPM(жӯЈдёӯ)гҖҒPB(жӯЈеӨ§)гҖӮжЁЎзіҠзҡ„еҒҸе·®еҸҳеҢ–зҺҮEC зҡ„иҜӯиЁҖеҖјйӣҶеҗҲд№ҹжңүдёғз§ҚеҸ–еҖј,еҲҶеҲ«жҳҜNB (иҙҹеӨ§)гҖҒNM (иҙҹдёӯ)гҖҒNS(иҙҹе°Ҹ)гҖҒO(йӣ¶)гҖҒPS(жӯЈе°Ҹ)гҖҒPM(жӯЈдёӯ)гҖҒPB (жӯЈеӨ§)гҖӮ
жЁЎзіҠ规еҲҷеә“жҳҜз”ұиӢҘе№ІдёӘжЁЎзіҠвҖңif-thenвҖқ规еҲҷзҡ„жҖ»е’Ңз»„жҲҗпјҢе®ғжҳҜжЁЎзіҠзі»з»ҹзҡ„ж ёеҝғйғЁеҲҶпјҢзі»з»ҹе…¶д»–йғЁеҲҶзҡ„еҠҹиғҪеңЁдәҺи§ЈйҮҠе’ҢеҲ©з”ЁиҝҷдәӣжЁЎзіҠ规еҲҷжқҘи§ЈеҶіе…·дҪ“й—®йўҳгҖӮеңЁжЁЎзіҠ规еҲҷжҺ§еҲ¶еҷЁдёӯзј–иҫ‘жЁЎзіҠжҺ§еҲ¶и§„еҲҷ,дёҚеҗҢзҡ„жЁЎзіҠжҺ§еҲ¶еҷЁдёҖиҲ¬жңүдёҚеҗҢзҡ„жЁЎзіҠжҺ§еҲ¶и§„еҲҷ,еӣ
дёәжЁЎзіҠжҺ§еҲ¶и§„еҲҷе®һиҙЁдёҠжҳҜе°Ҷж“ҚдҪңе‘ҳзҡ„жҺ§еҲ¶з»ҸйӘҢеҠ д»ҘжҖ»з»“иҖҢеҫ—еҮәдёҖжқЎжқЎжЁЎзіҠжқЎд»¶иҜӯеҸҘгҖӮеңЁжң¬ж¬Ўе®һйҷ…и®ҫи®ЎдёӯпјҢе…ұйҮҮз”ЁдәҶ49 жқЎвҖңifпјҚthenвҖқ规еҲҷпјҢж №жҚ®иҝҷдәӣ规еҲҷпјҢеҫ—еҮәеҰӮиЎЁ1 жүҖзӨәзҡ„жЁЎзіҠжҺ§еҲ¶и§„еҲҷиЎЁпјҡ

жЁЎзіҠжҺЁзҗҶе°ҶжЁЎзіҠ规еҲҷеә“дёӯзҡ„жЁЎзіҠвҖңif-thenвҖқ规еҲҷиҪ¬жҚўжҲҗжҹҗз§Қжҳ е°„пјҢеҚіе°Ҷиҫ“е…Ҙз©әй—ҙдёҠзҡ„жЁЎзіҠйӣҶеҗҲжҳ е°„еҲ°иҫ“еҮәз©әй—ҙдёҠзҡ„жЁЎзіҠйӣҶеҗҲгҖӮж №жҚ®иҝҷдәӣ规еҲҷиҝӣиЎҢжЁЎзіҠжҺЁзҗҶеҫ—еҲ°дёҖдёӘжЁЎзіҠйӣҶ, еҚіжЁЎзіҠжҺ§еҲ¶йҮҸU, еҶҚйҖҡиҝҮеҺ»жЁЎзіҠеҢ–зҺҜиҠӮ,е°Ҷе…¶иҪ¬еҢ–дёәжё…жҷ°зҡ„ж•°еӯ—жҺ§еҲ¶йҮҸ,иҫҫеҲ°и°ғиҠӮMAU жё©еәҰи®ҫе®ҡзҡ„зӣ®зҡ„гҖӮ
3.2.2 жҙҒеҮҖе®ӨзӣёеҜ№ж№ҝеәҰжҺ§еҲ¶
жҙҒеҮҖе®ӨзӣёеҜ№ж№ҝеәҰзҡ„жҺ§еҲ¶еҲҷз”ұMAU еҮәеҸЈж–°йЈҺж№ҝеәҰиҝӣиЎҢи°ғиҠӮпјҢе°ҶжҙҒеҮҖе®ӨзӣёеҜ№ж№ҝеәҰжөӢйҮҸеҖјдёҺзӣёеҜ№ж№ҝеәҰи®ҫе®ҡеҖјиҝӣиЎҢжҜ”иҫғпјҢз”ұжӯӨи®Ўз®—еҮәжүҖйңҖиҰҒMAU еҮәеҸЈж–°йЈҺзӣёеҜ№ж№ҝеәҰпјҢе…¶и®Ўз®—иҝҮзЁӢдёҺжё©еәҰи®ҫе®ҡеҖјзҡ„и®Ўз®—иҝҮзЁӢзұ»дјјпјҢ 然еҗҺй…ҚеҗҲMAU еҮәеҸЈж–°йЈҺжё©еәҰи®ҫе®ҡеҖјпјҢи®Ўз®—еҮәMAU зҡ„еҮәеҸЈйңІзӮ№жё©еәҰи®ҫе®ҡеҖјпјҢ з”ұжӯӨжқҘжҺ§еҲ¶MAU еҮәеҸЈзҡ„ж№ҝеәҰгҖӮ
4 з»“и®ә
е®һйҷ…еә”з”ЁдёӯпјҢйҖҡиҝҮеңЁжҙҒеҮҖе®Өжё©ж№ҝеәҰжҺ§еҲ¶зі»з»ҹдёӯеј•е…ҘжЁЎзіҠжҺ§еҲ¶зҺҜиҠӮе’ҢеҲҶзЁӢжҺ§еҲ¶зҺҜиҠӮпјҢеҸ‘жҢҘжЁЎзіҠжҺ§еҲ¶йІҒжЈ’жҖ§ејәгҖҒеҠЁжҖҒе“Қеә”еҘҪгҖҒдёҠеҚҮж—¶й—ҙеҝ«гҖҒи¶…и°ғе°Ҹзҡ„зү№зӮ№, еӨ§еӨ§жҸҗй«ҳдәҶж•ҙдёӘжҺ§еҲ¶зі»з»ҹзҡ„еҠЁжҖҒе“Қеә”зү№жҖ§пјҢеҗҢж—¶еҸҲе…·жңүPID жҺ§еҲ¶еҷЁзҡ„еҠЁжҖҒи·ҹиёӘе“ҒиҙЁе’ҢзЁіжҖҒзІҫ
еәҰпјҢ еҚҠеҜјдҪ“жҙҒеҮҖе®Өзҡ„зҺҜеўғжё©ж№ҝеәҰеҫ—еҲ°дәҶжӣҙеҘҪзҡ„жҺ§еҲ¶пјҢжіўеҠЁжӣҙе°ҸпјҢеҗҢж—¶д№ҹеҮҸе°‘дәҶиғҪжәҗзҡ„жөӘиҙ№гҖӮ
еҸӮиҖғж–ҮзҢ®
[1]еҲҳз‘һйңһпјҢзҺӢзҺІпјҢзҺӢж°ёжҷ°. жҙҒеҮҖе®Өзҡ„жё©ж№ҝеәҰжҺ§еҲ¶и®ҫи®Ў[J].иҮӘеҠЁеҢ–д»ӘиЎЁпјҢ2005пјҢпјҲ8пјү
[2]еҲҳз»ҙдәӯпјҢеј еҶ°пјҢжңұеҝ—е®Ү.дё»еҶ·еҮқеҷЁжЁЎзіҠжҺ§еҲ¶зі»з»ҹи®ҫи®Ў[J].з”өеӯҗ科жҠҖеӨ§еӯҰеӯҰжҠҘпјҢ2006пјҢпјҲ6пјү
[3]еҪӯиҷҺй”Ӣ.жё©ж№ҝеәҰеҸҢеҸҳйҮҸжЁЎзіҠжҺ§еҲ¶зі»з»ҹ[J].з”өж°”е·ҘзЁӢеә”з”ЁпјҢ2000пјҢпјҲ5пјү
[4]еҗҙжҷ“иҺүпјҢжһ—е“Іиҫү.MATLAB иҫ…еҠ©жЁЎзіҠзі»з»ҹи®ҫи®Ў[M].иҘҝе®үпјҡиҘҝе®үз”өеӯҗ科жҠҖеӨ§еӯҰеҮәзүҲзӨҫпјҢ2002
жң¬ж–Үж ҮзӯҫпјҡжҙҒеҮҖе®Ө
ең°еқҖпјҡеұұдёңзңҒжөҺеҚ—еёӮеӨ©жЎҘеҢәж–°еҫҗеұ…委дјҡй»„жІіе»әйӮҰеӨ§жЎҘиҘҝдҫ§1-6еҸ· з”өиҜқпјҡ0531-68824415 дј зңҹпјҡ0531-68824415
зүҲжқғжүҖжңү:жөҺеҚ—йЎәеҘҮеҮҖеҢ–е·ҘзЁӢжңүйҷҗе…¬еҸё жҠҖжңҜж”ҜжҢҒпјҡеә·зҫҺ科жҠҖ еӨҮжЎҲеҸ·:йІҒICPеӨҮ19040779еҸ· xmlең°еӣҫ htmlең°еӣҫ txtең°еӣҫ зҷ»еҪ•
