


济南顺奇净化工程有限公司
电话(传真):0531-68824415
手 机:13854165330
Q Q:340095748
联系人:张经理
邮 编:250024
邮 箱:340095748@qq.com
地 址:山东省济南市天桥区新徐居委会黄河建邦大桥西侧1-6号
洁净手术室作为医院中控制要求最高的单位之一,其对温湿度有着恒定的控制要求。但由于手术室内的无影灯、普通照明灯等均会对温度和湿度产生影响,导致其很难满足手术时温度和湿度需保持恒定的要求,故温、湿度指标是洁净手术室中最重要的控制指标。洁净手术室空调系统的温度与湿度控制效果对于手术有直接的影响,空调过滤器专家:手术室洁净空调先进控制系统的设计与实现介绍了一种基于西门予S7―200PLC和TD一400C的控制系统来实现洁净手术室对温湿度的控制。由于温湿度具有大滞后性,使用传统PID调节方法难以得到满意效果,通过引入温度变化率来调整死区,改善了系统的控制效果,有效避免了过冲。经过实际运行,验证其在洁净手术室控制系统中的可行性。
l系统控制要求
1.1温度控制要求
通过设置在风管里的温湿度一体传感器检测回风温度,并将所测得的温度信号送到PLC的模拟输入端。PLC将测得的温度和通过手术室面板温度设定值比较并进行PID计算,将结果输出到相应模拟量输出,如冷冻/热水的电动调节阀,通过控制其开度达到温度控制的目的。
1.2湿度控制要求
通过设置在风管里的温湿度一体传感器检测回风湿度,并将所测得的温度信号传送到PLC的模拟输入端。PLC将测得的湿度和通过手术室面板湿度设定值比较并进行PID计算,将结果输出到相应模拟量输出。在冬季模式里通过对加湿器电动调节阀的开度调节达到湿度控制的目的。而在夏季模式里,湿度的控制并非通过对加湿器开度的单一控制,而是对水阀调节器和加热器的综合PID控制实现的。
1.3风道压力控制
按照工艺要求,风道内压力需保持一定值,以满足手术室医用要求。系统通过变频器驱动送风机,事先将满足工艺要求时的变频器频率值作为设定值,将设置在管道内的回风压力检测传感器测得的压力值作为反馈值,通过PID计算控制变频器的输出频率,以达到风压控制要求。
1.4人机界面要求
按照现场工艺要求,在手术室内设有操作面板一块,可以设定温度,湿度并控制系统启停,同时面板上有实时温度和湿度显示功能;同样,在控制柜上安装了人机界面TD400C,通过TD400C也可设定温度湿度启停机组。出于调试系统的目的,在TD400C上设有强制模式,及人工设定回风温湿度,屏蔽报警信号。
TD400C的控制优先权高于手术室设定面板,可屏蔽来自手术室的设定信号。
1.5安全要求
该系统中故障信号有3种,分别是送风机故障信号,缺风保护故障信号,中效压差信号。这3种信号都是为了保障风道内的空气流通。报警要有声光显示,提醒工作人员采取措施。
2系统硬件及工艺简介
2.1硬件组成
整个系统硬件由检测元件,控制元件与执行元件组成。
通过设置在风道内的温湿度一体传感器来检测回风温湿度;通过设置在管风道内的压力传感器检测回风压力;通过设置在水管上的温度传感器来检测水温并以此判断工作模式;控制元件主要指S7―224PLC,TD400C及手术室控制面板;执行元件包括水管的电动调节阀,加湿器调节阀和加热器调节阀等。
2.2工艺介绍
系统启动后若无缺风保护等报警信号,则开始通过安装在送水管上的传感器检测水温工作模式系统。工作模式分为冬夏两季。若送水管水温大于30℃则为冬季模式,低于30℃则为夏季模式。
在冬季模式里,若回风温度低于设定温度,则打开水阀执行器,流出更多的热水以提高温度;若回风湿度低于设定湿度,则打开加湿器开度,以提高湿度。冬季模式里若回风温度高于设定值,则减小水阀执行器的输出开度;通常情况下冬季模式里回风湿度总是低于设定湿度的,故不考虑回风湿度高于设定湿度的可能。在夏季模式里,控制要求主要是除温除湿。该系统要求湿度优先调节。所谓湿度优先调节是指夏季湿度较高时候,控制器通过计算后调节送水管的开度(管内是7℃左右的冷冻水)达到降温除湿的目的,而由此造成的温度差则通过打开电加热器来补偿。当回风湿度达到设定要求时,系统自动进入温度控制状态。
3系统软件设计
根据工艺要求和硬件配置,采用西门子公司的STEP7MICRO/WIN32软件进行系统组态和TD400C人机界面设计。
软件设计主要包括温湿度控制,强制模式选择,工作模式选择和故障报警处理。
3.1模式选择
控制模式设置是指系统控制分为TD400C设置(手动)和手术室控制面板设置(自动)两种。在手动模式下又有强制和非强制模式。在手动模式下可以屏蔽手术室面板的设定温、湿度及系统启停信号。出于调试系统的考虑,系统还设置了强制模式。在强制模式下,可以手动设定回风温度、回风湿度、回风压力等传感器信号,并可以手动复位各种故障报警信号。
3.2故障报警处理
按照设计要求,如果出现送风机故障信号,缺风保护故障信号,中效压差信号,将有声光显示,提醒工作人员采取措施。
3.3温湿度控制
软件设计的核心部分是温湿度控制,采用PID控制来调节温湿度。PID控制指的是闭环控制系统的比例积分微分控制。
PID是一种线性控制器,它根据给定值r(t)和实际输出值y(t)构成控制偏差:
e(t)=r(t)一y(t)

将偏差比例(P),积分(I)和微分(D)通过一定线性组合构成控制量u(t)对被控对象进行控制。它的控制规律为:
式中:KP为比例系数;TI为积分时间常数,TD为微分时间常数。
当控制量的目标值与检测值之间存在误差(或称为控制偏差)时,误差小,操作量就小,误差越大,操作量就越大,故控制算法中含有偏差比例项,简称P动作。对具有自平衡性的控制对象施行比例控制,最后其步阶变化会留下一定的误差,称为稳态误差或偏移。使控制算法中含有误差积分比例项,可消除稳态误差,简称I动作。偏差的增减反映在操作量上,为了改善控制特性,所以使控制算法中含有偏差微分比例项,简称D动作,为一种预先动作。包含以上三种动作的控制算法即为PID控制。

式(1)也可以写成:
式中:KI=KP/TI为积分系数;KD=KP・TD为微分系数。
考虑到被控对象具有大滞后性,且PLC处理的是数字量,将式(2)离散化得:
式中:θ代表采样周期,e(k)代表此刻的误差,e(k一1)代表上次采样周期的误差。如果θ足够小,这种逼近可相当准确,被控过程与连续控制过程十分接近。这种算法称为位置式算法。位置式算法由于全量输出,所以每次输出均与过去的状态有关,计算时要对e(k)进行累加,计算机运算工作量大。而且,因为计算机输出的u(k)对应的是执行机构的实际位置,如计算机出现故障,u(k)的大幅度变化,会引起执行机构位置的大幅度变化,这种情况往往是生产实践中不允许的。考虑到本系统控制对象均为阀门,故采用增量式PID控制算法为宜。
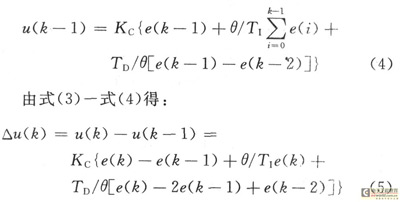
将式(3)按递推原理推得:
式(5)称为增量式PID算法。
由于控制增量△u(k)的确定仅与最近k次的采样值有关,所以较容易通过加权处理而获得较好的控制效果。
根据现场控制要求,被控过程不能有过冲现象即超调出现。然而结合现场施工情况且温度、湿度具有大滞后特性,不可避免地具有超调。
温度控制质量的决定性环节在于温度的PID控制参数的整定调节,PID参数整定质量决定了温度控制质量。在实际应用中,院方希望手术室的温度调节时间尽可能的快。然而温度的快速响应,会造成超调,并很可能形成长时间的温度震荡。温度调节速度和温度控制精度往往不可调和,如果在精度允许的前提下加快调节速度就意味着尽可能地减少震荡。通常的做法是在PID调节过程中引入死区来调节控制效果。然而,即使加了死区保护,但受制于现场条件,其效果不具备普遍性。
若设定Er为温度误差值,Es为温度设定值,Eb为温度实际值,Et为温度的死区,则:

这样带来的后果就是即使引入了死区,对PID调节效果的改善也是有限的。为此,引入温度变化率,通过温度变化率的变化来人为地改变死区,这样PID计算的误差值就会改变,调节速度也会随之改变。
设T1为一分钟之前的温度,T2为此刻的温度,Tc为温度的变化率,则Tc=T2一T1。通过Tc不仅能够判断温度的升降变化,亦能知道温度变化的快慢。
由此,利用Tc和当前的温度实际误差Es一Eb来设定温度死区。
若Es―Eb>0即温度没有达到设定值,且Tc>1,则令Et=|Es―Eb|,即对温度PID调节来说,误差Er输入为零,这时温度PID则停止调节,让温度自动上升,达到设定值。反之亦然。
4结语
温度直接影响病人及医护人员的舒适程度,而当房间湿度大于60%时候,细菌繁殖的速度就会大大加快,从控制细菌滋生的角度出发,湿度控制也极为重要。这就要求手术室内的空调系统能够根据特定的算法调节温湿度,并根据相应操作面板上的设定值快速响应实时控制要求。这里采用基于西门子S7―224cnPLC和文本显示器TD400C构成控制系统。
本文标签:手术室
